Slide 1 of 14
Slide 1 - 面向精密工程测量的 磁偏角快速测量算法
面向精密工程测量的 磁偏角快速测量算法
Chen Huizhen, Xu Caixu et al. Geospatial Information, Vol.24 No.3, Mar. 2026 DOI: 10.3969/j.issn.1672-4623.2026.03.026
---
Photo by Marek Piwnicki on Unsplash

Generated from prompt:
利用我所给的论文,将该ppt进行优化,插图进行替换,专业知识讲解再具体点。
This presentation details a fast algorithm for measuring magnetic declination in precision engineering surveys, overcoming electronic compass inaccuracies from environmental interference. It covers problem challenges, geomagnetic theory, GNSS-IMU-compass fusion methodology with multi-scale estimation and least-squares correction, experimental setup in complex terrain, results showing stable declination (e.g., ±0.33° vs. WMM) and 0.03m coordinate precision, plus innovations for inertial navigation applications.
面向精密工程测量的 磁偏角快速测量算法
Chen Huizhen, Xu Caixu et al. Geospatial Information, Vol.24 No.3, Mar. 2026 DOI: 10.3969/j.issn.1672-4623.2026.03.026
---
Photo by Marek Piwnicki on Unsplash
---
1
Challenges in Electronic Compass Accuracy for Precision Engineering
---
Photo by Annie Spratt on Unsplash
---
Photo by Shubham Dhage on Unsplash
2
GNSS + Compass Fusion for Rapid Declination Measurement
---
Photo by Valerie V on Unsplash

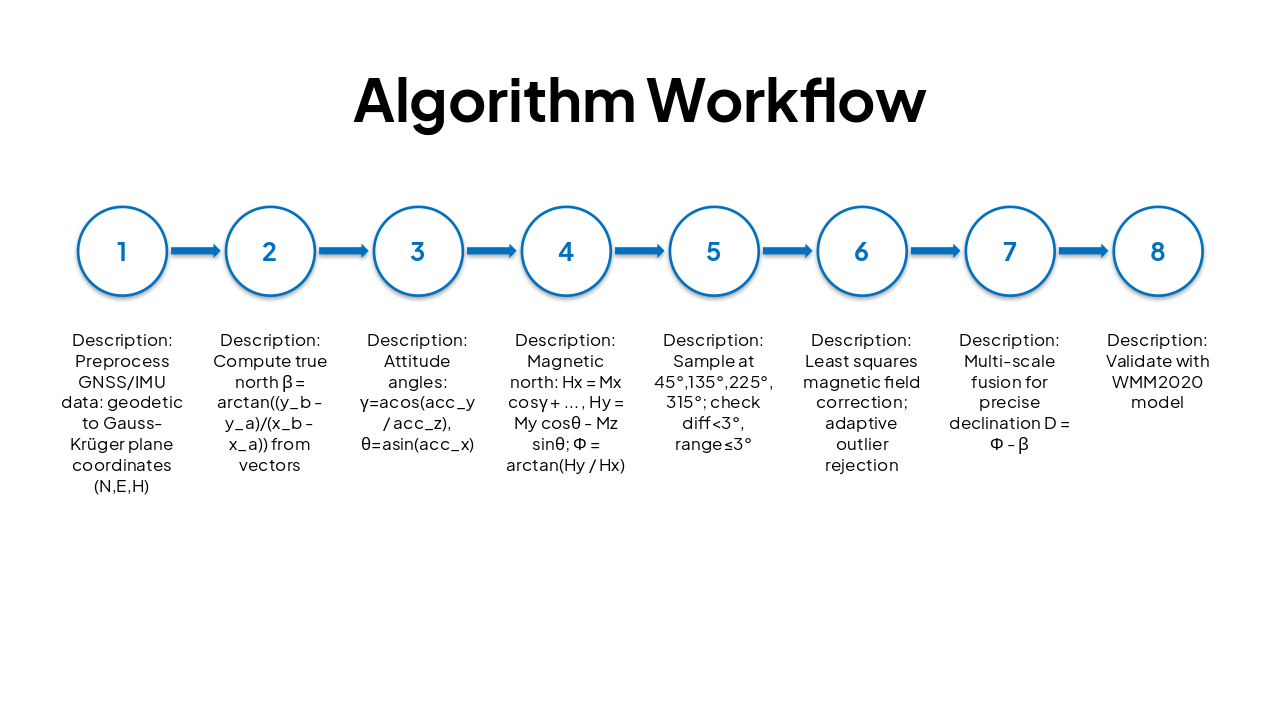
| Step | Description |
|---|---|
| 1 | Preprocess GNSS/IMU data: geodetic to Gauss-Krüger plane coordinates (N,E,H) |
| 2 | Compute true north β = arctan((yb - ya)/(xb - xa)) from vectors |
| 3 | Attitude angles: γ=acos(accy / accz), θ=asin(acc_x) |
| 4 | Magnetic north: Hx = Mx cosγ + ... , Hy = My cosθ - Mz sinθ; Φ = arctan(Hy / Hx) |
| 5 | Sample at 45°,135°,225°,315°; check diff<3°, range≤3° |
| 6 | Least squares magnetic field correction; adaptive outlier rejection |
| 7 | Multi-scale fusion for precise declination D = Φ - β |
| 8 | Validate with WMM2020 model |
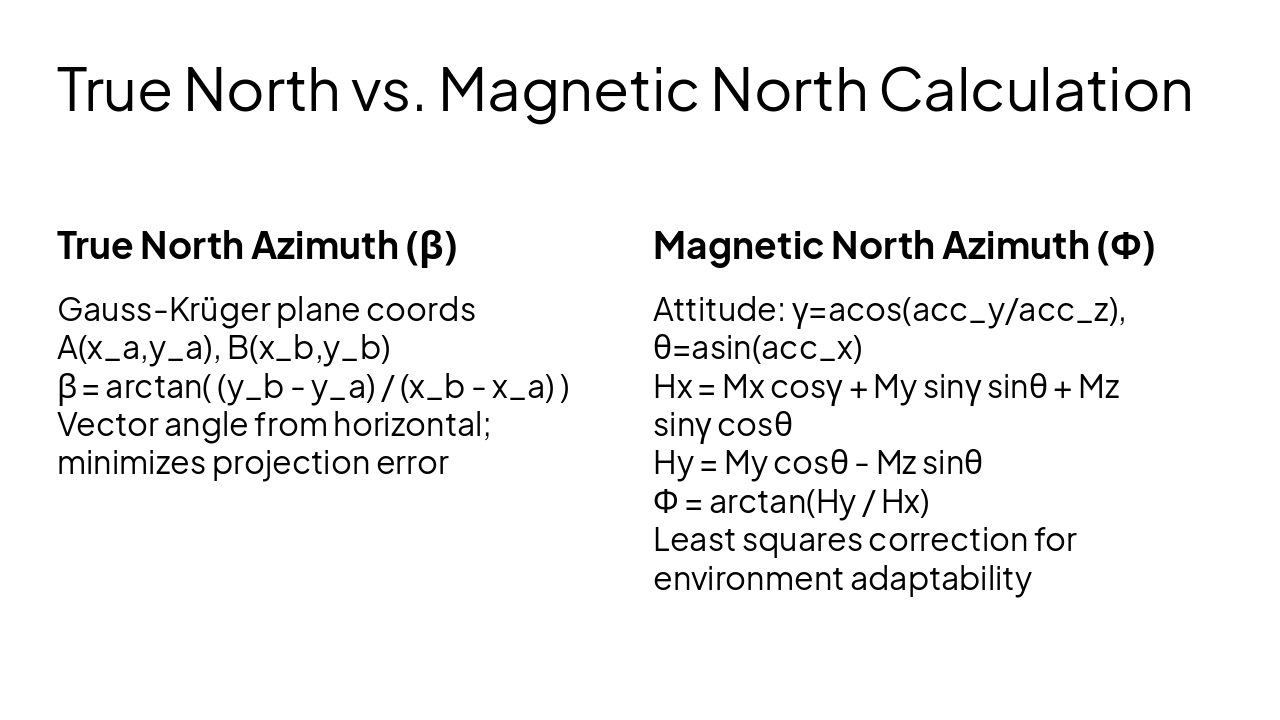
True North Azimuth (β) Gauss-Krüger plane coords A(xa,ya), B(xb,yb) β = arctan( (yb - ya) / (xb - xa) ) Vector angle from horizontal; minimizes projection error
Magnetic North Azimuth (Φ) Attitude: γ=acos(accy/accz), θ=asin(acc_x) Hx = Mx cosγ + My sinγ sinθ + Mz sinγ cosθ Hy = My cosθ - Mz sinθ Φ = arctan(Hy / Hx) Least squares correction for environment adaptability
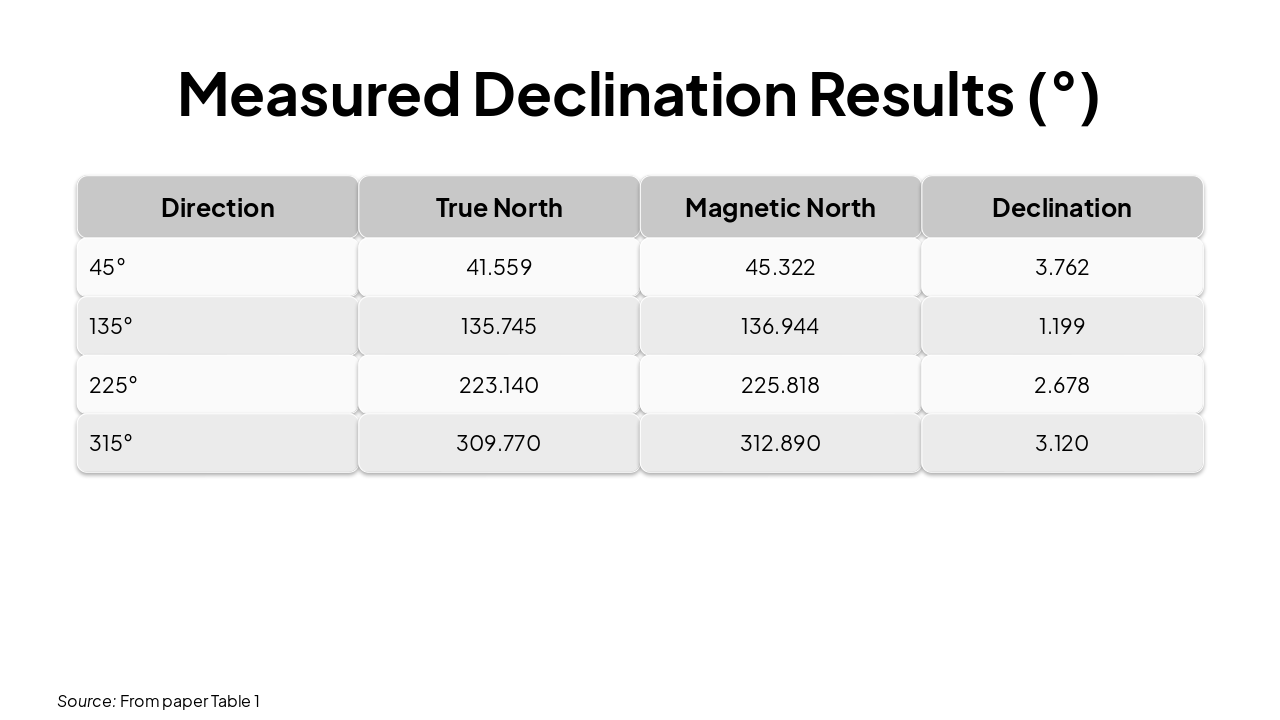
| Direction | True North | Magnetic North | Declination |
|---|---|---|---|
| 45° | 41.559 | 45.322 | 3.762 |
| 135° | 135.745 | 136.944 | 1.199 |
| 225° | 223.140 | 225.818 | 2.678 |
| 315° | 309.770 | 312.890 | 3.120 |
Source: From paper Table 1
---
Photo by Declan Sun on Unsplash

---
Photo by Isaac Smith on Unsplash
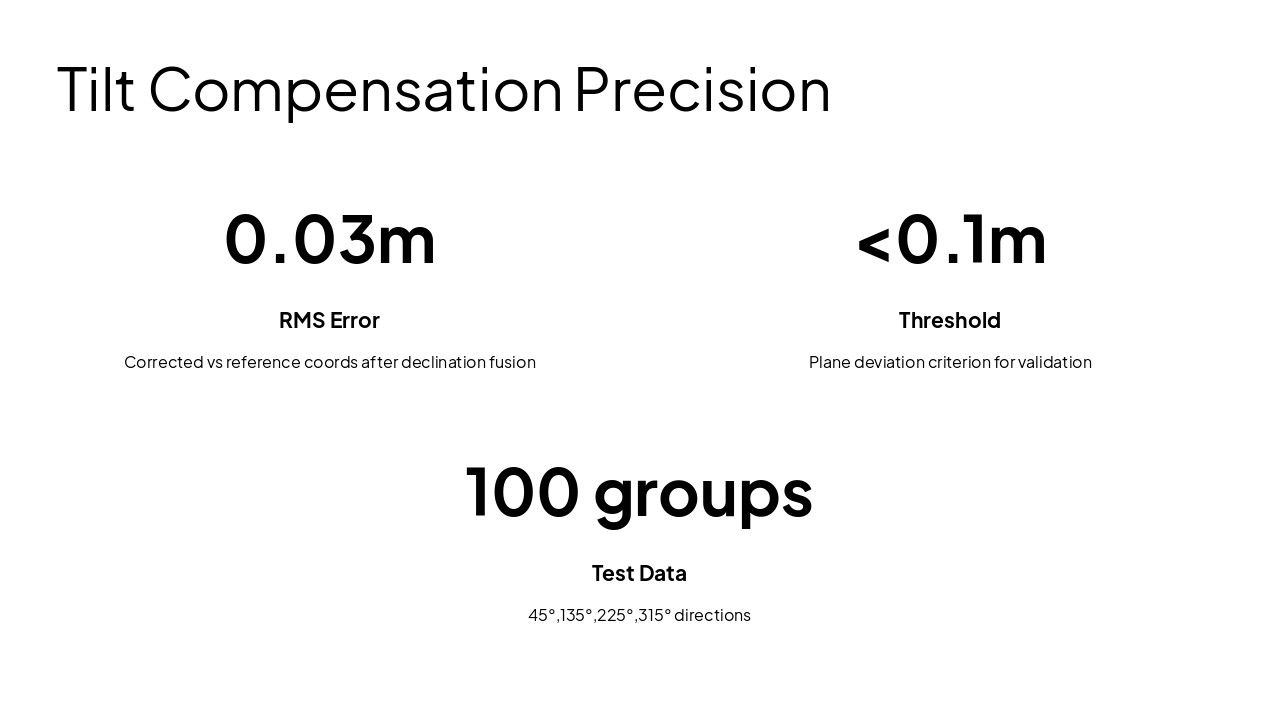
Algorithm achieves stable magnetic declination in any environment 0.03m coordinate correction precision via GNSS-compass fusion Innovations: Multi-scale estimation model, least squares correction, WMM validation High integration, simple operation, broad application in inertial navigation
Future: Optimize sampling efficiency, enhance anti-interference for harsh conditions
---
Photo by Robert Katzki on Unsplash
Explore thousands of AI-generated presentations for inspiration
Generate professional presentations in seconds with Karaf's AI. Customize this presentation or start from scratch.
