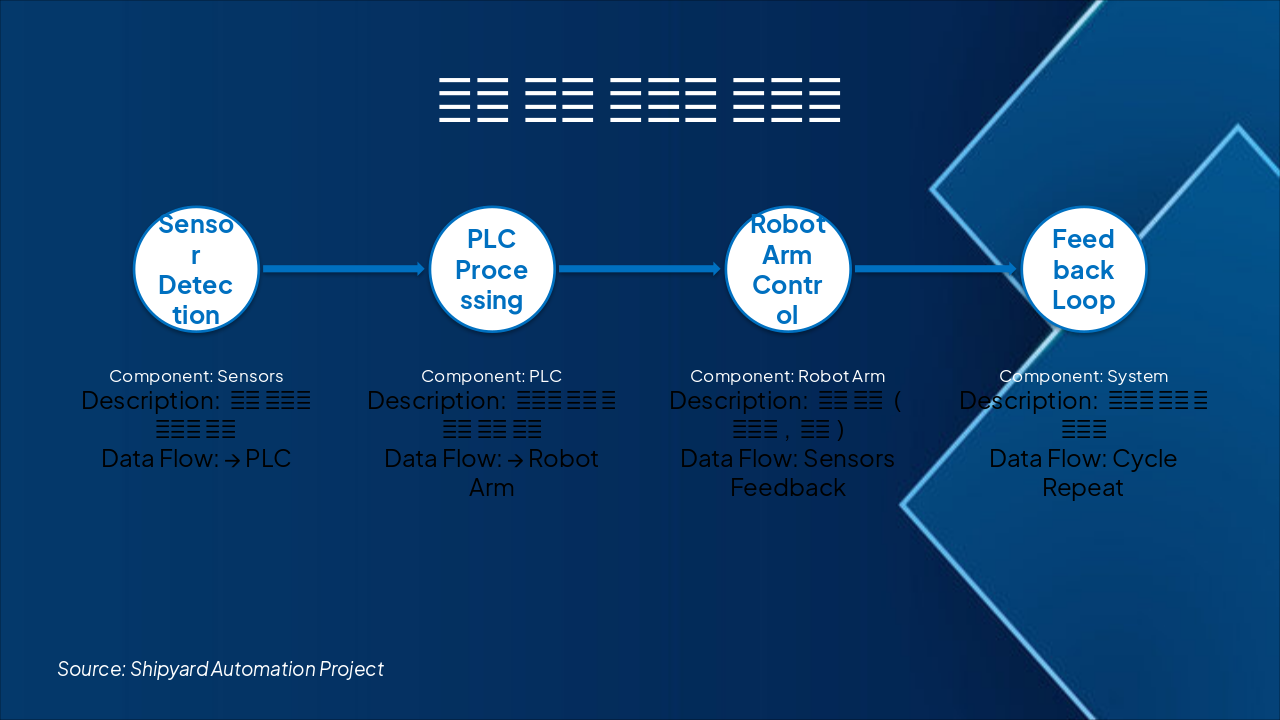
This slide outlines a ROS-based system architecture workflow across four phases: Sensor Input (Camera, LiDAR, IMU publishing to /sensordata), Perception & Planning (processing to /plannedpath), Control (to /controlcmd), and Actuator Output (to hardware). Each phase lists key components, data flows via ROS topics, and associated nodes like sensorpublishernode and controlnode.
시스템 아키텍처 / 설계도
{ "headers": [ "Phase", "Key Components", "Data Flow", "ROS Nodes" ], "rows": [ [ "Sensor Input", "Camera, LiDAR, IMU", "Raw Signals → /sensordata", "sensorpublishernode" ], [ "Perception & Planning", "Computer Vision, Path Planner", "/sensordata → /plannedpath", "perceptionnode, plannernode" ], [ "Control", "PID Controller, Motion Control", "/plannedpath → /controlcmd", "controlnode" ], [ "Actuator Output", "Motors, Grippers, Servos", "/controlcmd → Hardware Execution", "actuatordriver_node" ] ] }
Source: ROS Node-based Robot Control Architecture
Speaker Notes
센서 입력부터 액추에이터 출력까지의 데이터 흐름을 설명하세요. ROS 노드의 모듈러 설계가 로봇 제어의 유연성과 확장성을 어떻게 제공하는지 강조.