Slide 1 of 6
Slide 1 - Projet Véhicule Robotisé
Projet : Développement d'un Véhicule Robotisé
Concepts, architecture et développement d'un véhicule robotisé
---
Photo by Tom Parkes on Unsplash
Generated from prompt:
fait moi une presenattion sur un vehicule robotiser quand va coder
Présentation du développement d'un véhicule robotisé autonome : objectifs, systèmes de perception (LIDAR, caméras, GPS), intelligence embarquée avec algorithmes de décision, architecture technique et prochaines étapes.
Projet : Développement d'un Véhicule Robotisé
Concepts, architecture et développement d'un véhicule robotisé
---
Photo by Tom Parkes on Unsplash
---
Photo by Tom Parkes on Unsplash
📡 LIDAR Pour la détection à distance des objets et la cartographie 3D de l'environnement.
📷 Caméras embarquées Pour la lecture de signalétique et la reconnaissance d'objets spécifiques (piétons, autres véhicules).
🧭 GPS & IMU Pour la navigation précise et le positionnement global du robot.
📏 Capteurs Ultrasons Pour la détection de proximité immédiate afin d'éviter les collisions.
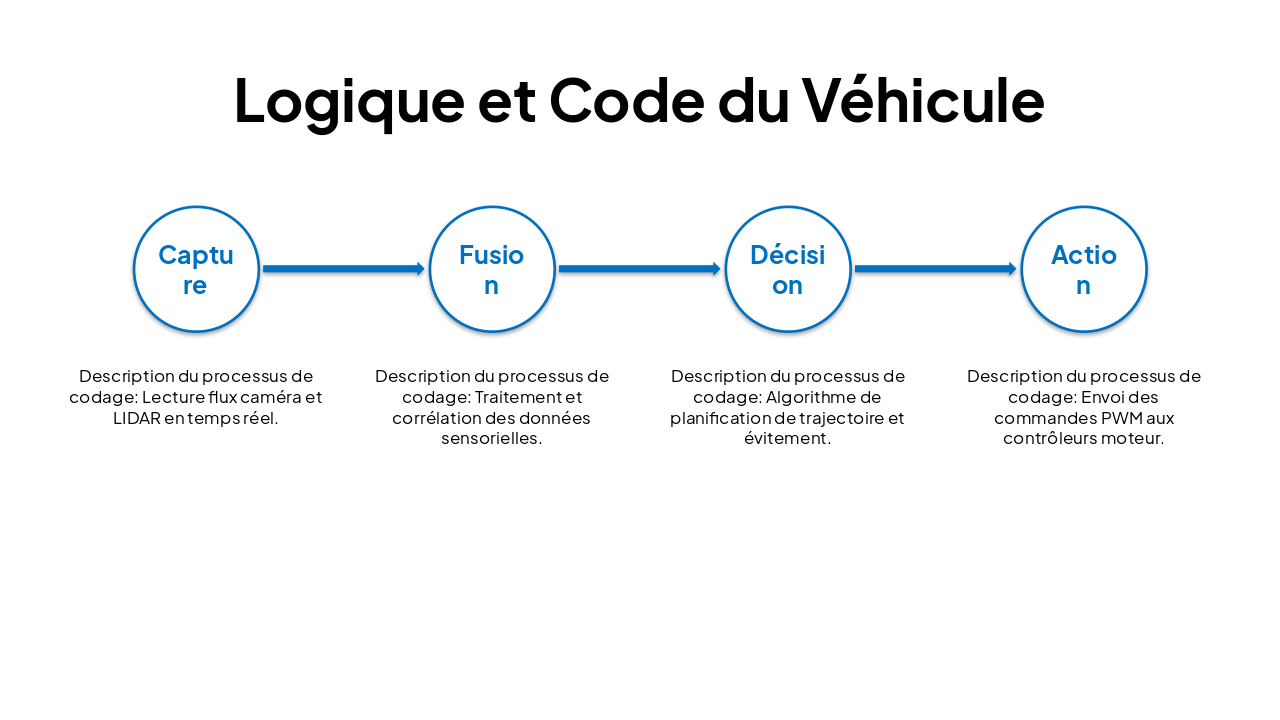
| Phase | Description du processus de codage |
|---|---|
| Capture | Lecture flux caméra et LIDAR en temps réel. |
| Fusion | Traitement et corrélation des données sensorielles. |
| Décision | Algorithme de planification de trajectoire et évitement. |
| Action | Envoi des commandes PWM aux contrôleurs moteur. |
Prochaines étapes : Déploiement et tests en conditions réelles.
Vers un véhicule autonome performant et sécurisé.
---
Photo by Tom Parkes on Unsplash

Explore thousands of AI-generated presentations for inspiration
Generate professional presentations in seconds with Karaf's AI. Customize this presentation or start from scratch.